
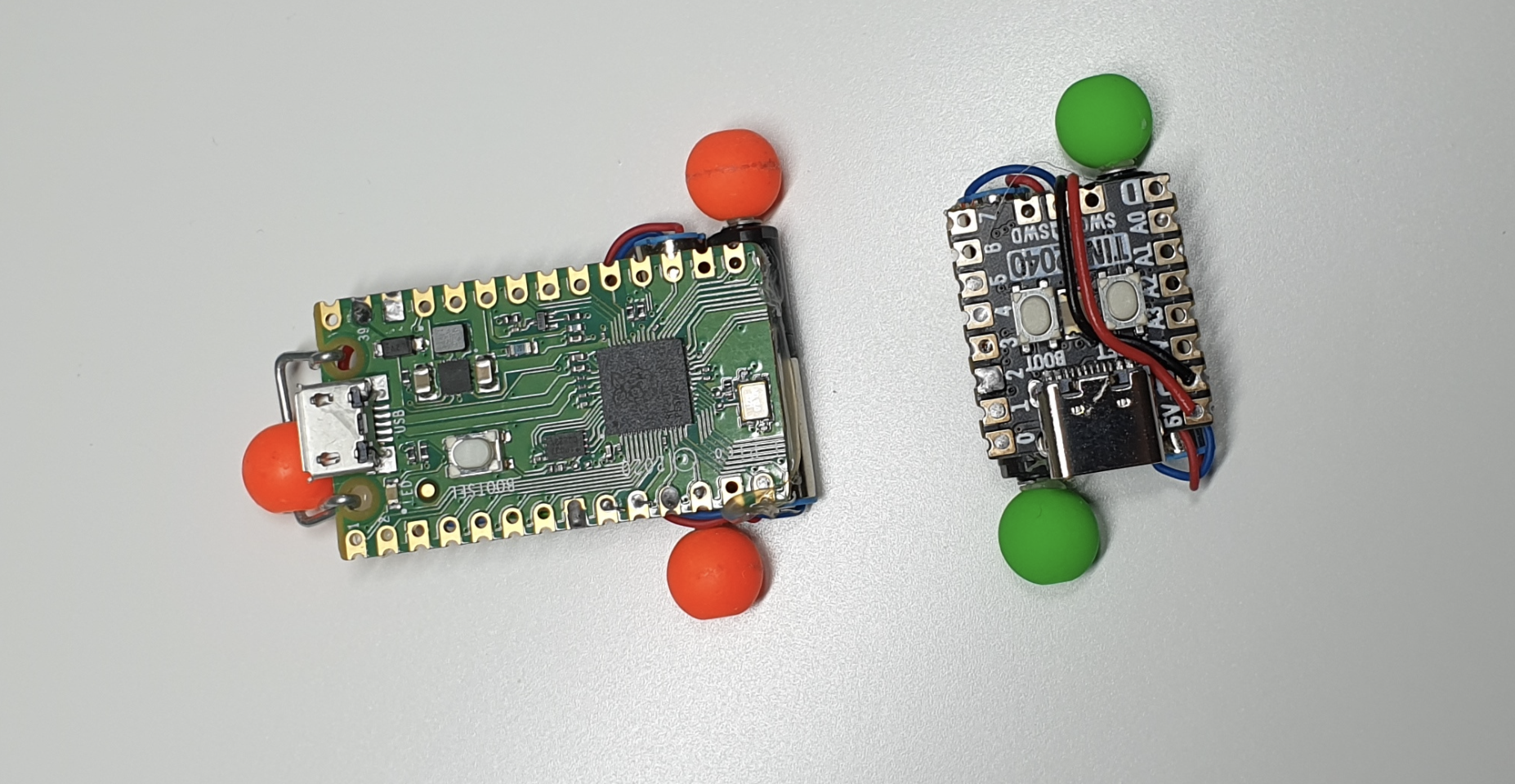
This effort used two motors, a DRV8833 motor driver, and a 70 mAh lithium-polymer battery. It moved along on three 8 mm wooden beads acting as wheels. To make it as small as possible, Kaisar decided to saw away Raspberry Pi Pico’s lower section.
“I had a number of these boards, so I took the risk to trim one, up to the crystal,” he explains. “Trimming a Raspberry Pi Pico board is not something I recommend, and it’s also not required for the functional operation of this robot.”
Joining the dots
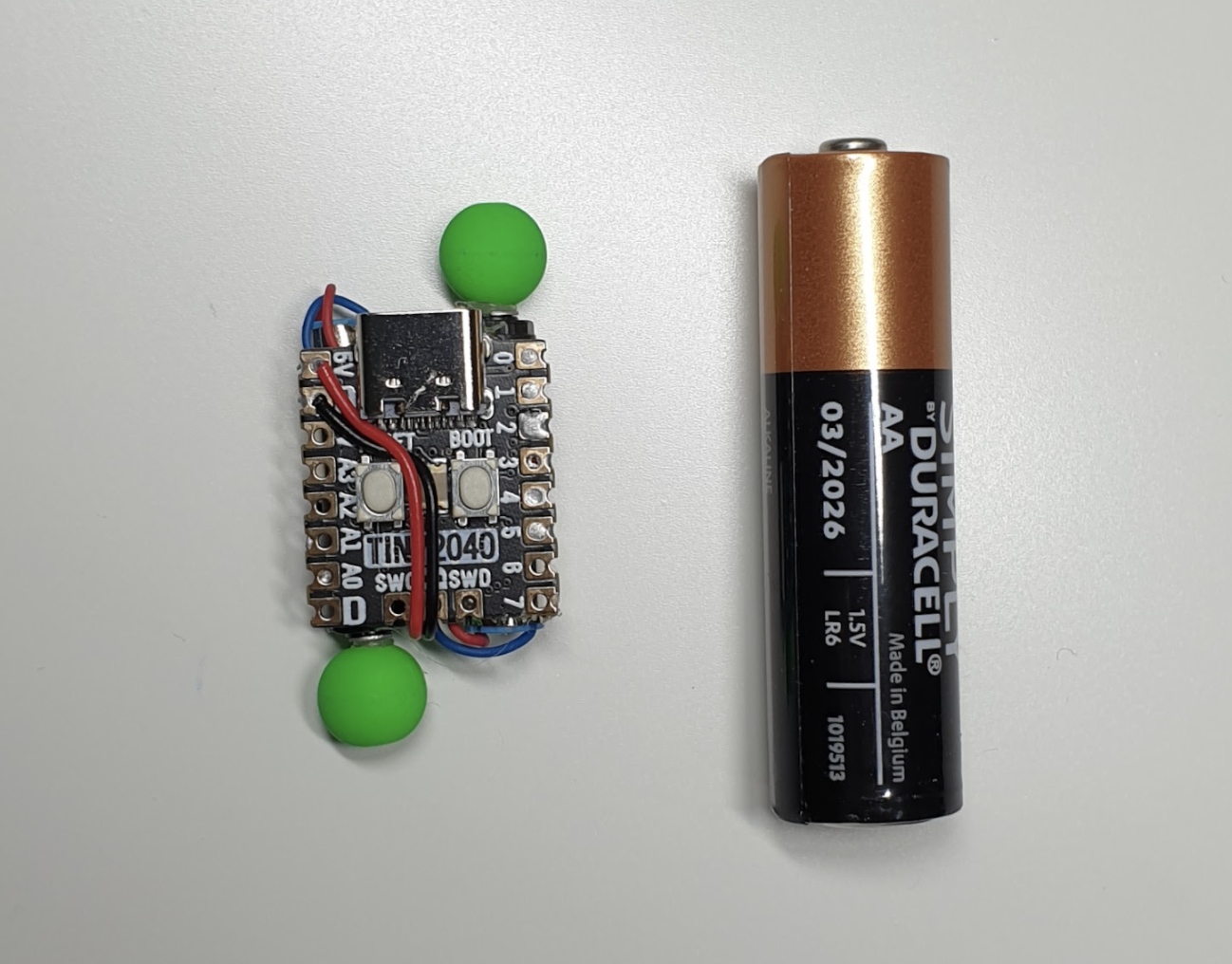
Having taken to Twitter to showcase Pica, he wanted to go even smaller. This time he turned his attention to Pimoroni’s Tiny 2040 – a development board that, as with Raspberry Pi Pico, includes the RP2040 microcontroller chip.
“I just wanted to make a smaller version of Pica utilising the Tiny 2040 board,” he says. Given the Tiny 2040 is roughly the size of a postage stamp, he could confidently claim on social media to have made the smallest Raspberry Pi robot in the world. This was Dot.
“The initial plan was to have the same DRV8833 motor driver and 6 mm motors,” he reveals. “But because of the much smaller size of the Tiny 2040, it was a little tricky to find room for the motor driver and still maintain the low profile and cuteness of the robot. Then I had the idea of measuring the motor current to see if they can be used without a motor driver.”
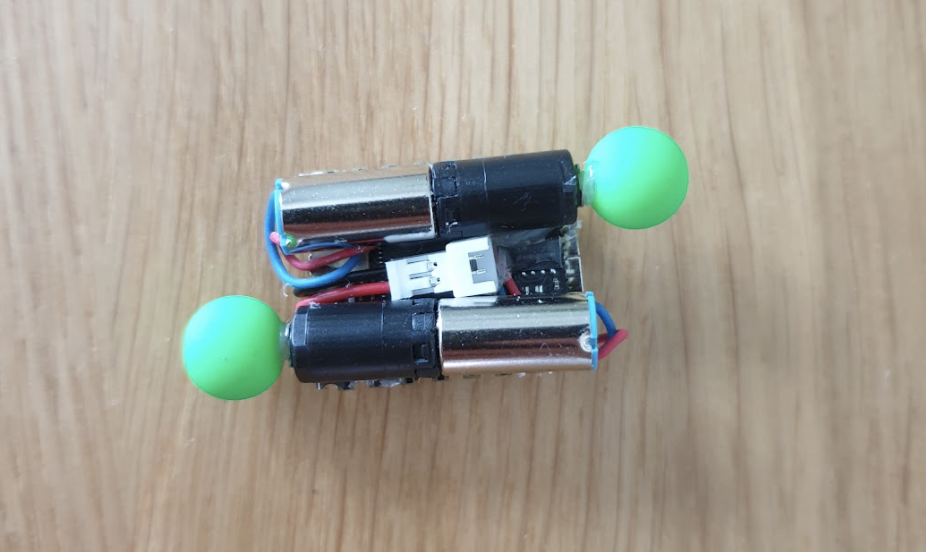
He found that they could, so the two 3 V geared DC motors were connected directly to the Tiny 2040 board’s GPIO pins. Kaisar admits there is a risk of damage – “running even these small motors off the GPIO should be avoided because of the potential spikes and high stall currents,” he says – but it allowed the robot to be as small and cute as possible.
Wooden wheels
This time, Kaisar used just two wooden bead wheels, with Dot having a zero-degree turning circle. “I think they look awesome,” Kaisar says. “They also get their uniqueness from the fact that the wheels are not on the same axle, so I learned that reinventing the wheel can actually be a satisfactory experiment.”
Dot is powered by a 70 mAh LiPo battery and, as with Pica, it has been programmed using CircuitPython. But there are limitations. “The robots have very minimal functionality so far – the moves are hard-coded,” Kaisar continues. “They don’t have remote controlling over wireless LAN, Bluetooth, or Zigbee either because that doesn’t excite me too much.
Even so, Kaisar is looking to improve both robots. He wants Dot to benefit from voice control and Pica to be able to draw. “Work is also in progress for machine-learning-based autonomous controls developed with the C++ SDK which will be made open-source,” Kaisar says, thinking big.






